Physical AI refers to artificial intelligence systems that don’t just process data; they perceive, reason about, and act within the physical world. Where conventional AI operates on text, images, or structured datasets entirely within software, physical AI closes the loop between perception and action: sensors gather real-world input, models make decisions, and actuators carry out physical tasks in real time.
This distinction matters because the physical world is unpredictable in ways that digital environments are not. Physical AI systems must account for friction, weight, lighting conditions, spatial uncertainty, and the consequences of failure all under tight time constraints, making physical AI one of the most computationally intensive AI frontiers.
The category is evolving quickly. Advances in foundation models, GPU-accelerated simulation, and robotics hardware are converging to make physical AI practical at scale for the first time. From AI robotics and autonomous vehicles to engineering simulations and industrial digital twins, organizations across industries are beginning to deploy AI that interacts with the world rather than simply describing it.
What makes AI “physical”?
Physical AI is defined by a tight relationship with its environment: it must sense, decide, and act, often in milliseconds, with real consequences if it gets it wrong.
Four characteristics distinguish physical AI from conventional AI systems:
- Real-world sensory input
Physical AI ingests data from the environment directly: cameras, LiDAR, depth sensors, microphones, force sensors, and proprioceptive feedback from joints and motors. Unlike language models that receive pre-processed text, physical AI models must make sense of raw, high-dimensional sensor streams. - Real-time inference and actuation
Decisions drive physical motion. A robot arm adjusting its grip, an autonomous vehicle braking for an obstacle, or an industrial system compensating for a defective part, all of these require inference fast enough to matter. - Closed-loop feedback
Physical AI systems continuously update their understanding of the environment based on the results of their actions. This feedback loop—sense, decide, act, observe, repeat—is fundamentally different from systems that process a query and return a static response. - Operation under physical constraints
Gravity, friction, material properties, and spatial geometry all apply. Physical AI models must generalize across environments that vary in ways software environments typically do not.
Physical AI vs. embodied AI: what’s the difference?
These terms are often used interchangeably, but they have a useful distinction. Embodied AI refers specifically to agents that inhabit a physical body, typically a robot or robotic system, and learn by interacting with their environment. Physical AI is the broader category. It includes embodied AI, but also encompasses AI systems that govern physical infrastructure, and industrial processes that don't necessarily learn through a physical body.
Think of it this way: all embodied AI is physical AI, but not all physical AI is embodied AI.
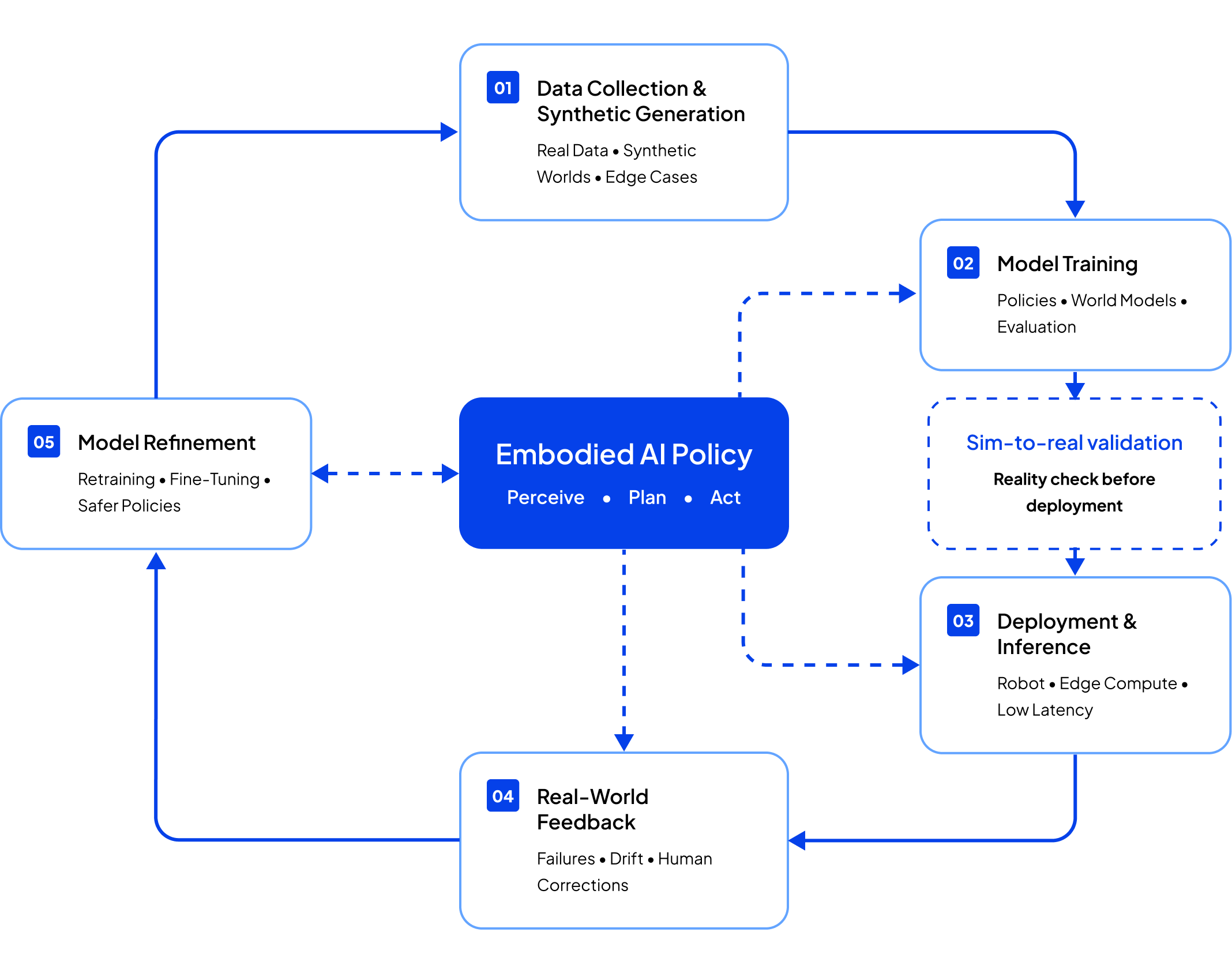
How physical AI works
Physical AI systems follow a continuous pipeline that moves from perception to action, cycling in real time. Each stage builds on the last, and a failure at any point can cascade through the rest of the system.
- Perception
Sensors collect raw data from the environment: visual feeds, depth maps, contact forces, sound, or positional data. This stage produces high-volume, high-velocity data streams that must be processed quickly and accurately.
- Representation
The AI constructs an internal model of the world: where objects are, how the environment is structured, and what has changed since the last observation. This may draw on techniques from computer vision, 3D scene understanding, or simultaneous localization and mapping (SLAM).
- Planning and reasoning
Given a goal and a world model, the system decides what to do. In modern physical AI, this increasingly involves large foundation models trained to generalize across tasks, rather than narrow models hard-coded for specific actions.
- Actuation
Commands are sent to motors, grippers, wheels, hydraulic systems, or other effectors. The physical output of the decision is executed in the real world.
- Simulation and training
Because real-world training data is expensive, slow, and sometimes dangerous to collect, physical AI models are largely trained in synthetic environments: physics simulators that model how objects behave under real-world conditions. Simulation platforms like NVIDIA Omniverse and Isaac Sim physically render and simulate millions of training scenarios at scale, while world foundation models such as NVIDIA Cosmos 3 generate synthetic sensor data and predict how scenes evolve—expanding training data far beyond what real-world collection can provide. Models learn across these environments before being transferred into deployment.
Bridging the gap between simulated performance and real-world performance, known as the sim-to-real gap, is one of the central technical challenges in the field.
Physical AI infrastructure requirements
Understanding how physical AI works makes clear why it places such unusual demands on compute infrastructure, and why those demands differ meaningfully from what a typical AI workload requires. The gap between training a large language model and training a physical AI model is not just one of scale; it’s one of kind.
The table below breaks down the five dimensions where physical AI infrastructure diverges most sharply from conventional AI.
Challenges in deploying physical AI
Physical AI is advancing rapidly, but deployment at scale remains genuinely difficult. The challenges span data, infrastructure, safety, and the fundamental difficulty of operating in a world that doesn’t behave the way simulation predicts.
Common challenges include:
- Data volume and movement: once systems are deployed, the problem inverts; a single autonomous vehicle can generate terabytes of sensor data per day, and storing, transferring, and training on petabyte-scale datasets efficiently becomes an infrastructure challenge in its own right
- The sim-to-real gap: models that perform well in simulation often fail in the real world, where surface textures, lighting, and material behavior are harder to replicate than they appear
- Safety and reliability: when a physical AI system makes an error, the consequences can be material; a misclassified obstacle or a failed grasp can cause real harm, raising the bar for testing and validation significantly
- Data scarcity: real-world training data is expensive and slow to collect, creating a bootstrap problem: you need deployed systems to generate good data, but you need good data to safely deploy systems
- Latency and edge infrastructure: millisecond response requirements mean inference can't always be routed through a central data center; deploying GPU hardware at the edge adds cost, cooling, and operational complexity
- Generalization across environments: a model trained in one factory or region may not transfer cleanly to another, often requiring significant retraining when moving to new deployment contexts
Real-world applications of physical AI and AI robotics
Despite the challenges, physical AI is already being deployed at scale across a range of industries. In each case, the value proposition is similar: AI that can perceive and adapt to real-world conditions outperforms rigid, rule-based automation in environments that are variable, unpredictable, or too complex for traditional programming.
Industrial automation and manufacturing
Manufacturing is one of the highest-adoption areas for physical AI today. AI-powered robotic arms can handle tasks that were previously too variable for conventional automation, adapting grip strength in real time, compensating for part-to-part variability, and performing quality inspection that would otherwise require human vision. AI-driven process control systems monitor production lines continuously, identifying anomalies and making adjustments without human intervention. For manufacturers operating at scale, the gains in throughput and defect reduction are substantial.
Autonomous vehicles and logistics
Self-driving vehicles and autonomous logistics systems represent some of the most demanding physical AI deployments. These systems must process sensor data from multiple modalities simultaneously, reason about the intentions of other agents, and make safety-critical decisions in real time, all while operating in environments that may differ significantly from training conditions. Autonomous forklifts, delivery robots, and long-haul trucking systems are moving from pilot programs to production deployments, enabled by advances in physical AI and the infrastructure to support it.
Healthcare and surgical robotics
Surgical robotics systems use physical AI to assist surgeons with precision tasks that exceed the limits of unaided human dexterity. AI-guided systems can stabilize instrument movement, provide real-time tissue identification, and assist with minimally invasive procedures that would otherwise require open surgery. Rehabilitation robotics, powered exoskeletons, and AI-guided diagnostic hardware are also emerging applications, each with strict requirements for latency, reliability, and safety.
Companies building physical AI
The physical AI landscape spans large enterprises building dedicated programs and purpose-built companies focused entirely on the space. Both categories are moving quickly.
Enterprises with significant physical AI programs:
- NVIDIA: Omniverse and Isaac platforms for simulation, robot training, and physical AI research
- Google DeepMind: robotics division focused on general-purpose robot learning and dexterous manipulation
- Amazon: large-scale warehouse and logistics robotics powered by AI
- Tesla: Optimus robot program, applying autonomous vehicle AI techniques to physical robotics
- Boston Dynamics: advanced mobile robots (Atlas, Spot) increasingly driven by AI for perception, locomotion, and manipulation
- Siemens: industrial automation and digital twin platforms increasingly integrated with AI for manufacturing and infrastructure applications
Companies purpose-built for physical AI:
- Monolith AI: physics-informed machine learning for engineering simulation and physical system modeling, a part of the CoreWeave ecosystem
- Physical Intelligence (pi): foundation model research for general-purpose robot learning
- Covariant: AI for robotic manipulation in warehouse and logistics environments; core team joined Amazon in 2024
- Intrinsic (Google): software platform for industrial robotics, spun out of Google X
- Figure AI: general-purpose robotics focused on labor and manufacturing applications
- Wayve: end-to-end foundation models for autonomous driving, trained on globally diverse real-world data
This landscape is evolving rapidly; funding rounds, acquisitions, and new entrants are reshaping it on a quarterly basis. The list above reflects the state of the market as of mid-2026 and will be refreshed accordingly.